
Rotations-Viskosimeter
Studienarbeit von Vincent Bredeck & Stefan Münst
Das Instrument besteht im wesentlichen aus zwei konzentrischen Zylindern, zwischen denen sich die Messflüssigkeit befindet. Der innere Zylinder wird über einen kleinen Getriebemotor mit vorgegebener Spannung gedreht. Die Drehzahl wird mit einer Lichtschranke an der Achse gemessen und mithilfe eines Microcontrollers (Arduino) angezeigt. Aus der Drehzahl und den Motordaten lässt sich die Viskosität der Flüssigkeit bestimmen.
Video
Physikalischer Hintergrund
Die Viskosität ist ein Maß für den Widerstand eines Fluids gegen Bewegungen, genauer ein Maß für den Impulsübertrag zwischen Fluidteilchen. Je höher die Viskosität ist, desto "zäher" ist ein Fluid, desto mehr Kraft muss man aufwenden, um es zu bewegen (Beispiel: Umrühren von Kaffee oder Honig).
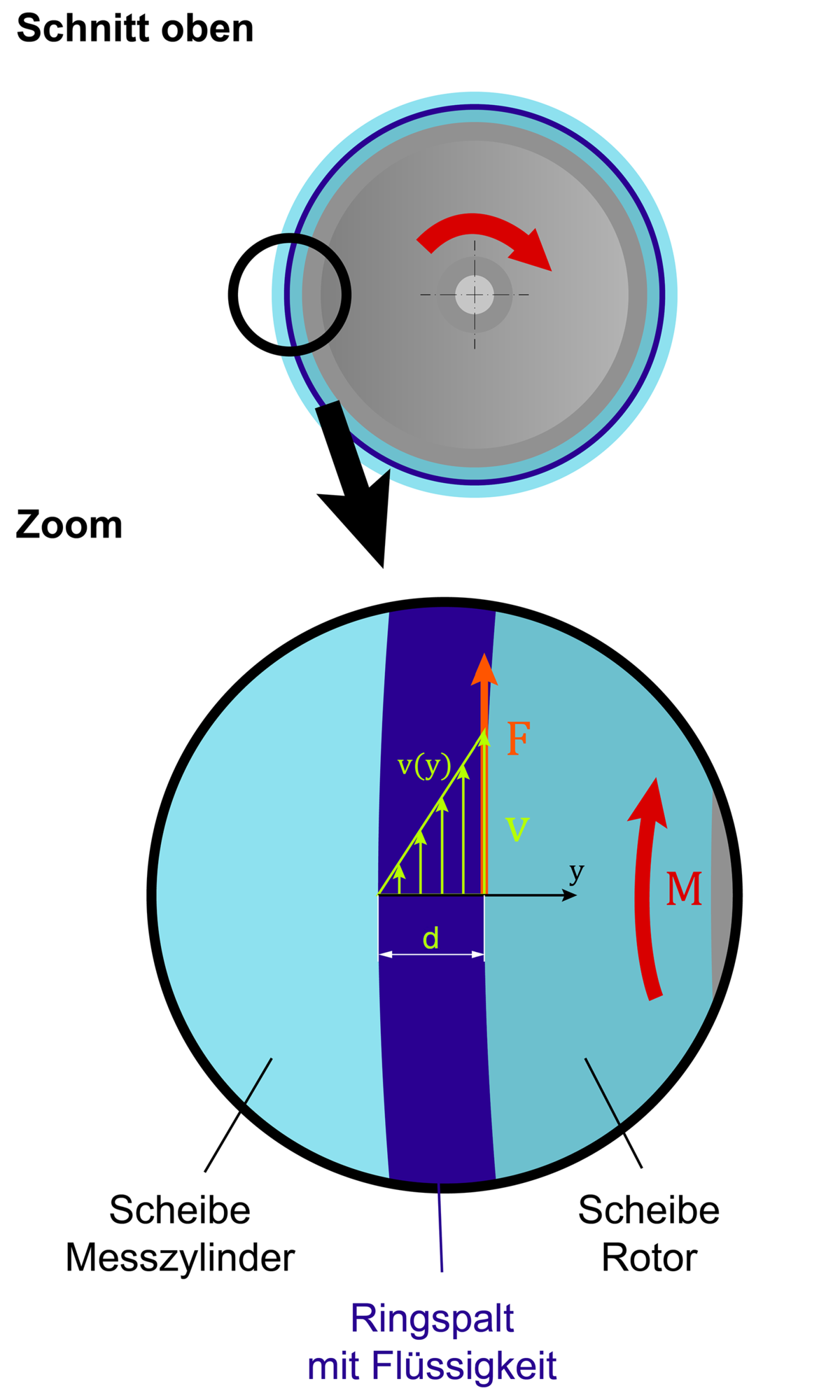
Bewegt man beispielsweise eine Glasplatte über einen Wasserfilm auf einer ebenen Fläche, ist die aufzuwendende Kraft \(F\) proportional zur Fläche \(A\) und der Geschwindigkeit \(v\), und umgekehrt proportional zur Dicke \(d\) des Films. Die Proportionalitätskonstante ist die (dynamische) Viskosität \(\eta\).
$${F \over A} = \eta{v \over d} .$$
Viele Fluide, unter anderem Wasser und Öle können damit beschrieben werden. Sie werden als Newtonsche Fluide bezeichnet. Beim Rotationsviskosimeter ist \(d\) die Spaltbreite zwischen den Mantelflächen der beiden Zylinder. Ist diese klein gegenüber dem Radius \(r\) des inneren Zylinders, lässt sich leicht eine Beziehung zwischen Drehzahl \(n\), Flüssigkeitshöhe \(h\), aufzuwendendem Drehmoment \(M\) und der Viskosität herleiten,
$$M = \eta \cdot 4 \cdot \pi^2 \cdot n \cdot {r^3 \cdot h \over d} .$$
In der Realität gibt es auch einen Spalt zwischen den Böden von innerem und äußerem Zylinder. Die diesbezügliche Korrektur der Gleichung wird hier nicht betrachtet.
Das Drehmoment \(M\) lässt sich aus den Motorkenndaten, Spannungs- und Stromversorgung und der Drehzahl ermitteln.
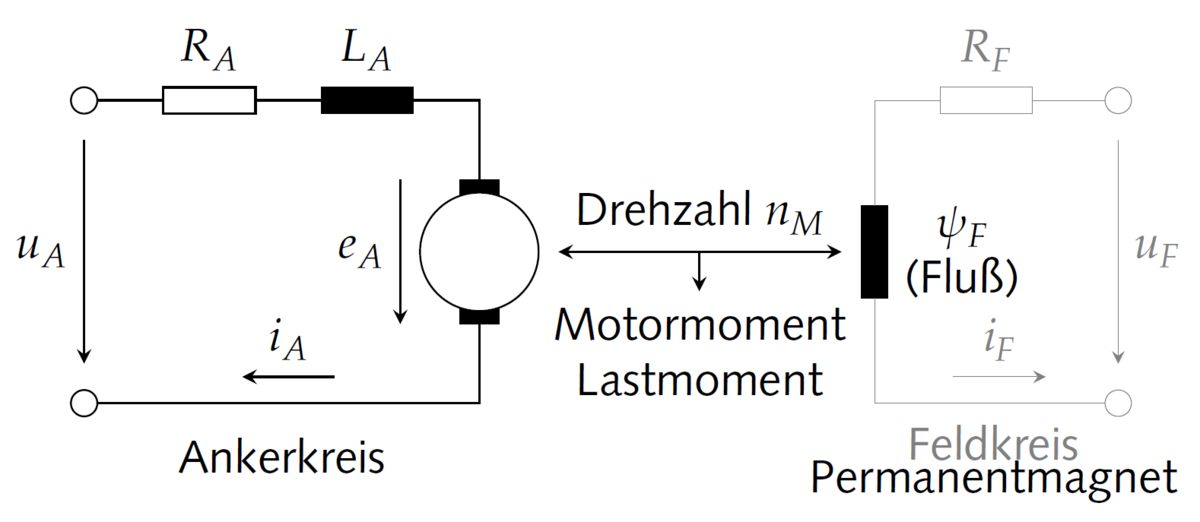
Der Motoranker kann als Reihenschaltung von ohmschem Widerstand \(R_{A}\) und Induktivität \(L_{A}\) modelliert werden. Ankerspannung \(u_{A}\) und Strom \(i_{A}\) sind verknüpft über
$$u_{A} = R_{A}i_{A} + L_{A} {di_{A} \over dt} + e_{A} .$$
Dabei ist \(e_{A}\) die vom magnetischen Fluss des Ständers induzierte Spannung. Als Motor wird in dem Versuch ein permanenterregter Gleichstrommotor verwendet. Der Fluss \(\psi_{F}\) durch die Pole des Erreger-Magneten ist in guter Näherung konstant. Die induzierte Spannung kann dann als periodisch mit der Motordrehzahl \(n_{M}\) angesetzt werden,
$$e_{A} = cn_{M}\psi_{F} ,$$
mit einer motorabhängigen Konstanten \(c\). Im stationären Zustand sind Drehzahl, Spannung und Strom daher verknüpft über
$$u_{A} = R_{A}i_{A} + c\psi_{F}n_{M} .$$
Damit kann die Motorkonstante \(c\psi_{F}\) aus Messdaten bestimmt werden.
Nur die induzierte Spannung kann in mechanische Arbeit umgesetzt werden, die anderen Anteile von \(u_{A}\) sind auch ohne Erregerfeld vorhanden und beschreiben die Arbeit, die zur Aufrechterhaltung des Ankerstroms nötig ist. Bei der Drehbewegung hängen Leistung \(P\), Winkelgeschwindigkeit \(w\) und Drehmoment \(M_{M}\) grundsätzlich zusammen über
$$P = wM_{M} = 2\pi n_{M}M_{M} .$$
Das bedeutet hier für das Motormoment
$$M_{M} = {e_{A}i_{A} \over 2\pi n_{M}} = {c\psi_{F} \over 2\pi} i_{A} .$$
Das Motormoment wird allerdings nicht verlustfrei auf den rotierenden Zylinder des Viskosimeters übertragen. Bezeichnet man das Verlustmoment mit \(M_{V}\), gilt
$$M = {n_{M} \over n} M_{M} - M_{V} .$$
Das Verlustmoment ist gerätespezifisch und nicht von der Messflüssigkeit abhängig. Es lässt sich durch die Messung einer Flüssigkeit bekannter Viskosität ermitteln. In diesem Fall ist \(M\) bekannt, das Motormoment lässt sich messen und daraus \(M_{V}\) bestimmen.
Damit ist die Ermittlung der Viskosität einer unbekannten Flüssigkeit auf eine einfache Messung von Drehzahl, Strom und Spannung zurückgeführt.